LIBRARY IEEE;
USE IEEE.std_logic_1164.ALL;
USE IEEE.std_logic_unsigned.ALL;
USE IEEE.std_logic_arith.ALL;
ENTITY step_motor IS
PORT(
f, p, d: INSTD_LOGIC:='0';
speed : inSTD_LOGIC_VECTOR(1 downto 0);
coil : OUTSTD_LOGIC_VECTOR(3 downto 0)
);
END step_motor;
ARCHITECTURE behavior OF step_motor IS
SIGNAL ind_coil: STD_LOGIC_VECTOR(3 downto 0) := "0001";
SIGNAL clk_scan: STD_LOGIC;
SIGNAL PHASE,DIRECTION:STD_LOGIC;
signal t:std_logic_vector(3 downto 0);
signal comp:integer range 0 to 2500 ;
SIGNAL osc:STD_LOGIC;
BEGIN
coil <= t;
process(f,osc)
variable delay:integer range 0 to 50;
begin
if (f'event and f='1') then
if delay>=50 then delay:=0;osc<=not osc;
else delay:=delay+1;
end if;
end if;
if (osc'event and osc='1') then
case speed is
when "10" => if comp<2500 then comp<=comp+1;
else comp<=comp;
end if;
when "01" => if comp>2 then comp<=comp-1;
else comp<=comp;
end if;
when others => if comp<2 then comp<=2;
else comp<=comp;
end if;
end case;
end if;
end process;
PROCESS
VARIABLE d_ff: integer range 0 to 2500;
BEGIN
WAIT UNTIL f = '1';
if d_ff >= comp then
d_ff :=0; clk_scan <= not CLK_SCAN;
else
d_ff := d_ff + 1;
end if;
END PROCESS ;
PROCESS(F)
VARIABLE B:STD_LOGIC;
BEGIN
IF (F'EVENT AND F='1') THEN B:=(P and (b and P) );
IF B='1' THEN PHASE<=NOT PHASE ;B:='0';
ELSIF P='0' THEN PHASE<=PHASE;B:='1';
END IF;
END IF;
END PROCESS;
PROCESS(F)
VARIABLE B:STD_LOGIC;
BEGIN
IF (F'EVENT AND F='1') THEN B:=(D and (b and D) );
IF B='1' THEN DIRECTION<=NOT DIRECTION ;B:='0';
ELSIF D='0' THEN DIRECTION<=DIRECTION;B:='1';
END IF;
END IF;
END PROCESS;
motor:
process
begin
--if (clk_scan'event and clk_scan='1') then
WAIT UNTIL clk_scan= '0';
CASE phase IS
WHEN '1' =>
IF direction = '0' THEN
IF ((ind_coil = "1001") or (ind_coil = "0000")) THEN
ind_coil <= "0001";
ELSE
ind_coil <= (ind_coil(2 downto 0) & ind_coil(3));
END IF;
ELSE
IF ((ind_coil = "1001") or (ind_coil = "0000")) THEN
ind_coil <= "1000";
ELSE
ind_coil <= (ind_coil(0) & ind_coil(3 downto 1));
END IF;
END IF;
WHEN OTHERS =>
ind_coil<=IND_COIL;
END CASE;
t<=not ind_coil;
END PROCESS motor;
END behavior;
-
 热敏电阻温度阻值查询程序2024年11月13日 74
热敏电阻温度阻值查询程序2024年11月13日 74 -
C99语法规则2024年11月16日 675
-
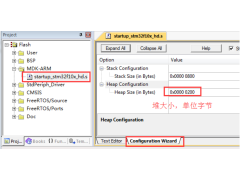 FreeRTOS 动态内存管理2024年11月12日 448
FreeRTOS 动态内存管理2024年11月12日 448 -
一款常用buffer程序2024年11月06日 88
-
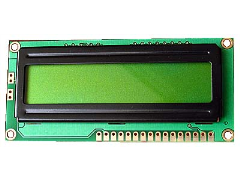 1602液晶显示模块的应用2012年08月03日 192
1602液晶显示模块的应用2012年08月03日 192 -
GNU C 9条扩展语法2024年11月18日 261
-
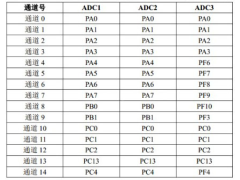 如何实现STM32F407单片机的ADC转换2024年11月15日 300
如何实现STM32F407单片机的ADC转换2024年11月15日 300 -
 STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
-
C99语法规则2024年11月16日 675
-
 51单片机LED16*16点阵滚动显示2012年09月05日 664
51单片机LED16*16点阵滚动显示2012年09月05日 664 -
FreeRTOS 动态内存管理2024年11月12日 448
-
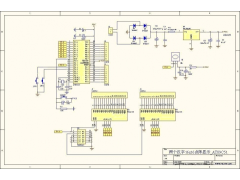
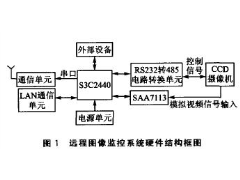 ARM9远程图像无线监控系统2012年07月03日 424
ARM9远程图像无线监控系统2012年07月03日 424 -
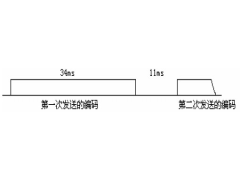 用单片机模拟2272软件解码2012年09月06日 300
用单片机模拟2272软件解码2012年09月06日 300 -
如何实现STM32F407单片机的ADC转换2024年11月15日 300
-
 新颖的单片机LED钟2012年08月06日 278
新颖的单片机LED钟2012年08月06日 278 -
GNU C 9条扩展语法2024年11月18日 261