三相步进电机驱动
2012-09-22
三相步进电机的三相六拍工作方式,正转的绕组通电顺序:A、AB、B、BC、C、CA、A,反转的通电顺序:A、AC、C、CB、B、BA、B、A。
由于步进电机转子有一定的惯性以及所带负载的惯性,故步进电机的工作过程中不能及时的启动和停止,在启动时应慢慢的加速到预定速度,在停止前应逐渐减速到停止,否则,将产生失步现象。
步进电机的控制问题可总结为两点:
1、产生工作方式需要的时序脉冲;
2、控制步进电机的速度,使它始终遵循加速、匀速、减速的规律工作。
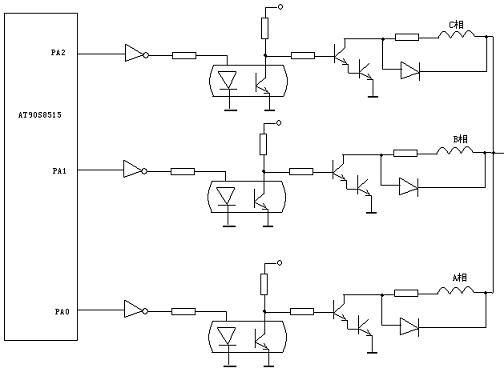
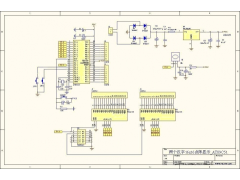
系统:

接口:
程序:
#include<io8515v.h>
#include<macros.h>
const char zhzhuan[7] = {0x06, 0x04, 0x05, 0x01, 0x03, 0x02, 0x00};
const char fanzhuan[7] = {0x06, 0x02, 0x03, 0x01, 0x05, 0x004, 0x00};
const int time[5] = {4000, 3200, 2400, 1600, 800}; /*脉冲宽度:0.05m,0.04ms,0.03ms,0.02ms,0.01ms*/
char num;/*将要转动的步数*/
char direct;/*转动方向,0为反转,1为正转*/
char num_run; /*已经转动的步数*/
void main(void)
{
DDRA = 0x07;
TCCR1A = 0x00;
TCCR1B = 0x09;
TIMSK = 0x10;
SREG |= 0x80;
while (1)
{
;
}
}
#pragma interrupt_handler time1coma:5
void time1coma(void)
{
char i, j;
if (num > 9) {
if (num_run < 5)
{
OCR1A = time[num_run];
}
/*增速*/
else if (num_run > (num - 5))
{
OCR1A = time[num - num_run]; /*减速*/
}
}
else {
i = (num + 1) / 2;
if (num_run < (i)) {
OCR1A = time[num_run];
}
/*增速*/
else {
OCR1A = time[num - num_run];
}
/*减速*/
}
if (num_run < num)
{
j = num_run % 6;
if (direct == 1)
{
PORTA = zhzhuan[j];
}
else
{
PORTA = fanzhuan[j];
}
num_run += 1;
}
else
{
OCR1A = 0x0fa0;
}
}
可能会用到的工具/仪表
相关文章
推荐文章
-
 热敏电阻温度阻值查询程序2024年11月13日 74
热敏电阻温度阻值查询程序2024年11月13日 74 -
C99语法规则2024年11月16日 675
-
 FreeRTOS 动态内存管理2024年11月12日 448
FreeRTOS 动态内存管理2024年11月12日 448 -
一款常用buffer程序2024年11月06日 88
-
 1602液晶显示模块的应用2012年08月03日 191
1602液晶显示模块的应用2012年08月03日 191 -
GNU C 9条扩展语法2024年11月18日 261
-
 如何实现STM32F407单片机的ADC转换2024年11月15日 300
如何实现STM32F407单片机的ADC转换2024年11月15日 300 -
 STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
热门文章
-
C99语法规则2024年11月16日 675
-
 51单片机LED16*16点阵滚动显示2012年09月05日 664
51单片机LED16*16点阵滚动显示2012年09月05日 664 -
FreeRTOS 动态内存管理2024年11月12日 448
-
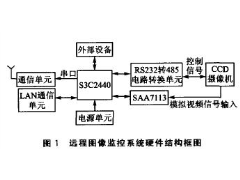 ARM9远程图像无线监控系统2012年07月03日 424
ARM9远程图像无线监控系统2012年07月03日 424 -
 用单片机模拟2272软件解码2012年09月06日 300
用单片机模拟2272软件解码2012年09月06日 300 -
如何实现STM32F407单片机的ADC转换2024年11月15日 300
-
 新颖的单片机LED钟2012年08月06日 278
新颖的单片机LED钟2012年08月06日 278 -
GNU C 9条扩展语法2024年11月18日 261
章节目录