keil c51红外遥控解码程序
2012-12-19
大炮
本keil c51程序适用uPC1621/uPC1622及兼容的红外遥控器芯片,占用外部中断0和定时器1,以中断方式解码,节省系统资源,以查询方式检测遥控信号是否有效.
解码思路:
红外线经一体化接受头解码放到后送到单片机的外部中断0,单片机设置外部中断下降沿触发,T0和T1为16位定时器,T0在系统启动后定时5ms.T1在外部中断0启动后开始定时,初值为0,每次在INT0中断后先读T1计数值,并重设初值为0,而且判断T1的计数值,
代码
//Fosc=11.0592MHz
// states for and variables IR data processing ;
typedef enum {
IR_idle,
IR_waitstart,
IR_getaddr,
IR_getaddrinv,
IR_getdata,
IR_getdatainv
} _IRstate;
_IRstate IRstate = IR_idle;
unsigned char IRaddr = 0xff;
unsigned char _IRaddr = 0xff;
unsigned char IRdata = 0xff;
unsigned char _IRdata = 0xff;
unsigned char IR_repeat = 0;
unsigned char IR_ready = 0;
unsigned charIR_poweron = 0;
//bit ir_done=0;
// time constants
unsigned int IRtimer = 0; // IR timeout
//cpu初始化
void cpu_init(void)
{
TMOD = 0X11; // T0 and T1 十六位定时
TH0 = 0xee; //fosc=11.0592M,timer=5ms
TL0 = 0x00;
TR0 = 1; // run timer 0;
TF0 = 0;
ET0 = 1; // enable tmr 0 overflow interrupt
IT0 = 1; // int0 edge sensitive
EX0 = 1; //enable "int0"
EA = 1; // global interupt enable
}
//T0中断
void tmrint() interrupt 1
{
TH0 = 0xee;
TL0 = 0x00;
if (IRtimer) { //IR接收超时
--IRtimer; //
}
else {
IRstate = IR_idle;
//IR_poweron=0;
}
}
//Fosc=11.0592MHz
#define msec_12p50x2d00
#define msec_150x3600
#define msec_90x2066
//#define msec_90x1066
#define msec_2p50x900
#define msec_0p90x33d
#define msec_1p680x610
//void IRint() interrupt 0(void)
//When the IR receive pin goes low and interrupt is generated
// IR is collected by starting timer 2 in the first falling edge of the pin
// then on every other falling edge, the timer value is saved and the timer restarted .
// the captured time is then used to get the IR data
// a "start of data" is 13.5Msec,a "1" is 2.25Msec,a "0" is 1.12 msec and a "repeat" is 11.25msec.
// the counter increments at 1.085 Usec
// I allow a fairly large tolerance to time jitter but there are no false triggers seen.
void IRint() interrupt 0
{
static unsigned char bits;
unsigned short time;
switch (IRstate) {
case IR_idle:
TL1 = 0;
TH1 = 0;
TR1 = 1;
IRstate = IR_waitstart;
IRtimer = 26;
break;
case IR_waitstart: //P2_4=!P2_4;
TR1 = 0;
time = TH1;
time = (time << 8) + TL1;;
TL1 = 0;
TH1 = 0;
TR1 = 1;
if ((time > msec_12p5) && (time < msec_15)) { // greater than 12.5Msec & less than 15 msec = start code
IRaddr = 0;
_IRaddr = 0;
IRdata = 0;
_IRdata = 0;
bits = 1;
IRstate = IR_getaddr;
}
else if ((time > msec_9) && (time {
IR_repeat = 2;
IRstate = IR_idle;
}
else {
// to short, bad data just go to idle
IRstate = IR_idle;
}
break;
case IR_getaddr:// P2_4=!P2_4;
TR1 = 0;
time = TH1;
time = (time << 8) + TL1;;
TL1 = 0;
TH1 = 0;
TR1 = 1;
if ((time > msec_2p5) || (time
{
IRstate = IR_idle;
break;
}
if (time > msec_1p68) // greater than 1.68Msec is a 1
{
IRaddr |= bits;
}
bits = bits << 1;
if (!bits)
{
IRstate = IR_getaddrinv;
bits = 1;
}
break;
case IR_getaddrinv://P2_4=!P2_4;
TR1 = 0;
time = TH1;
time = (time << 8) + TL1;;
TL1 = 0;
TH1 = 0;
TR1 = 1;
if ((time > msec_2p5) || (time
{
IRstate = IR_idle;
break;
}
if (time > msec_1p68) // greater than 1.68Msec is a 1
{
_IRaddr |= bits;
}
bits = bits << 1;
if (!bits)
{
IRstate = IR_getdata;;
bits = 1;
}
break;
case IR_getdata:
TR1 = 0;
time = TH1;
time = (time << 8) + TL1;;
TL1 = 0;
TH1 = 0;
TR1 = 1;
if ((time > msec_2p5) || (time
{
IRstate = IR_idle;
break;
}
if (time > msec_1p68) // greater than 1.68Msec is a 1
{
IRdata |= bits;
}
bits = bits << 1;
if (!bits)
{
IRstate = IR_getdatainv;
bits = 1;
}
break;
case IR_getdatainv:
TR1 = 0;
time = TH1;
time = (time << 8) + TL1;;
TL1 = 0;
TH1 = 0;
TR1 = 1;
if ((time > msec_2p5) || (time
{
IRstate = IR_idle;
break;
}
if (time > msec_1p68) // greater than 1.68Msec is a 1
{
_IRdata |= bits;
}
bits = bits << 1;
if (!bits)// we have it all , now we make sure it is a NEC code from the CHS IR transmitter
{
// make sure address,~address are correct , data ,~data are correct and address is 0.
IR_ready = ((IRaddr ^ _IRaddr) == 0xff) && ((IRdata ^ _IRdata) == 0xff) && (IRaddr == 0);
if (IR_ready)
{
IRstate = IR_idle;
}
}
break;
default:
IRstate = IR_idle;
break;
}
}
void main(void)
{
cpu_init();
while (1)
{
if (IR_ready)
{
IR_ready = 0;
switch (IRdata)
{
case 0x45://1
//your code
break;
case 0x44://3
//your code
break;
case 0x43://4
//your code
break;
case 0x08://prev
//your code
break;
case 0x5a://next
//your code
break;
default:
break;
}
}
}
}
可能会用到的工具/仪表
相关文章
推荐文章
-
 热敏电阻温度阻值查询程序2024年11月13日 74
热敏电阻温度阻值查询程序2024年11月13日 74 -
C99语法规则2024年11月16日 675
-
 FreeRTOS 动态内存管理2024年11月12日 448
FreeRTOS 动态内存管理2024年11月12日 448 -
一款常用buffer程序2024年11月06日 88
-
 1602液晶显示模块的应用2012年08月03日 192
1602液晶显示模块的应用2012年08月03日 192 -
GNU C 9条扩展语法2024年11月18日 261
-
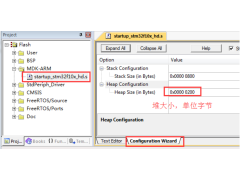
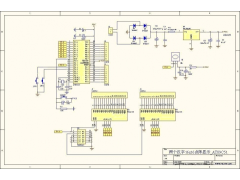
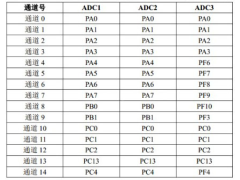 如何实现STM32F407单片机的ADC转换2024年11月15日 300
如何实现STM32F407单片机的ADC转换2024年11月15日 300 -
 STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
热门文章
-
C99语法规则2024年11月16日 675
-
 51单片机LED16*16点阵滚动显示2012年09月05日 664
51单片机LED16*16点阵滚动显示2012年09月05日 664 -
FreeRTOS 动态内存管理2024年11月12日 448
-
 ARM9远程图像无线监控系统2012年07月03日 424
ARM9远程图像无线监控系统2012年07月03日 424 -
 用单片机模拟2272软件解码2012年09月06日 300
用单片机模拟2272软件解码2012年09月06日 300 -
如何实现STM32F407单片机的ADC转换2024年11月15日 300
-
 新颖的单片机LED钟2012年08月06日 278
新颖的单片机LED钟2012年08月06日 278 -
GNU C 9条扩展语法2024年11月18日 261
章节目录