PID控制的51汇编程序
2012-10-24
标签:
PID
;//**************************************************************************************************************
;//功能: 电机控制的PID(积分分离)PID(void)执行时间少于70uS/932-12MHz
;//设 计 者: 牟联树
;//日期: 2003.12.28
;//版 本 号: 1.0
;//申明:
;//**************************************************************************************************************
$NOMOD51
OCRAH equ 0EFh
OCRAL equ 0EEh
OCRBH equ 0FBh
OCRBL equ 0FAh
OCRCH equ 0FDh
OCRCL equ 0FCh
OCRDH equ 0FFh
OCRDL equ 0FEh
TCR21 equ 0f9h
$include (REG52.INC)
NAMEPIDWork
?PR?PID?PIDWorkSEGMENTCODE
?PR?PID_MUL?PIDWork SEGMENTCODE
?PR?PID_out?PIDWork SEGMENTCODE
?DT?PID_k?PIDWorkSEGMENTDATA
PUBLICPID_Kp,PID_Ki,PID_Kd,PID_Umax,PID_Emax
PUBLICPID_U,PID_En1,PID_En2,PID_Temp,PID_TempL
RSEG?DT?PID_k?PIDWork
PID_Kp: DS2 ;比例系数
PID_KpLdata PID_Kp+1
PID_Ki: DS2 ;积分系数
PID_KiLdata PID_Ki+1
PID_Kd: DS2 ;微分系数
PID_KdLdata PID_Kd+1
PID_Umax:
DS2 ;期望最大值设定
PID_UmaxLdata PID_Umax+1
PID_Emax:
DS2 ;积分分离的误差最大值设定
PID_EmaxLdata PID_Emax+1
PID_U: DS2 ;当前的采样值
PID_ULdata PID_U+1
PID_En1:DS2 ;上一次计算的误差值
PID_En1Ldata PID_En1+1
PID_En2:DS2 ;上一次计算的误差的误差值
PID_En2Ldata PID_En2+1
PID_Temp:
DS4 ;计算过程中的暂存
PID_TempLdata PID_Temp+1
PID_Temp1data PID_Temp+2
PID_Temp1Ldata PID_Temp+3
PUBLIC_PID
RSEG?PR?PID?PIDWork
_PID: push acc
push psw
clr c ;有符号减法
mov a,PID_UmaxL;计算当前的误差En(PID_U里暂存运算结果)
subb a,PID_UL
mov PID_UL,a
mov a,PID_Umax
subb a,PID_U
mov PID_U,a
jnb acc.7,PID_k
mov a,PID_UL
cpl a
add a,#1
mov r7,a
mov a,PID_U
cpl a
addc a,#0
xch a,r7
sjmp PID_g
PID_k: mov r7,PID_U
mov a,PID_UL
PID_g: clr c
subb a,PID_EmaxL
mov a,r7
subb a,PID_Emax
jnb acc.7,PID_a;如果En>Emax则转
mov r7,PID_KiL ;Ki*En
mov r6,PID_Ki
mov r5,PID_UL
mov r4,PID_U
acall PID_MUL ;二字节伪有符号乘法(r4-r7里暂存结果)
mov a,PID_Temp1L ;PID加法子程序(将结果加入输出)
add a,r7
mov PID_Temp1L,a
mov a,PID_Temp1
addc a,r6
mov PID_Temp1,a
mov a,PID_TempL
addc a,r5
mov PID_TempL,a
mov a,PID_Temp
addc a,r4
mov PID_Temp,a
PID_a: mov a,PID_En1L ;更新PID_En1
xch a,PID_UL
mov PID_En1L,a
mov a,PID_En1
xch a,PID_U
mov PID_En1,a
clr c ;有符号减法
mov a,PID_En1L ;计算当前的误差差(En-En1)
subb a,PID_UL
mov PID_UL,a
mov a,PID_En1
subb a,PID_U
mov PID_U,a
mov r7,PID_KpL ;+Kp*(En-En1)
mov r6,PID_Kp
mov r5,PID_UL
mov r4,PID_U
acall PID_MUL
mov a,PID_Temp1L ;PID加法子程序(将结果加入输出)
add a,r7
mov PID_Temp1L,a
mov a,PID_Temp1
addc a,r6
mov PID_Temp1,a
mov a,PID_TempL
addc a,r5
mov PID_TempL,a
mov a,PID_Temp
addc a,r4
mov PID_Temp,a
clr c ;有符号减法
mov a,PID_UL ;计算误差差的差(En-En1-En2),同时更新En2
subb a,PID_En2L
mov PID_En2L,a
mov a,PID_U
subb a,PID_En2
mov PID_En2,a
mov r7,PID_KdL ;+Kd*(En-En1-En2)
mov r6,PID_Kd
mov r5,PID_En2L
mov r4,PID_En2
acall PID_MUL
mov a,PID_Temp1L ;PID加法子程序(将结果加入输出)
add a,r7
mov PID_Temp1L,a
mov a,PID_Temp1
addc a,r6
mov PID_Temp1,a
mov a,PID_TempL
addc a,r5
mov PID_TempL,a
mov a,PID_Temp
addc a,r4
mov PID_Temp,a
pop psw
pop acc
ret
ret
;//**************************************************************************************************************
;//功能: 电机控制电流环的PIPI_I(void)执行时间少于50uS/932-12MHz
;//设 计 者: 牟联树
;//日期: 2003.12.28
;//版 本 号: 1.0
;//申明:
;//**************************************************************************************************************
PUBLIC _PID_out
RSEG ?PR?PID_out?PIDWork
_PID_out:
push acc
push psw
clr c
mov a,r6
rrc a
mov r6,a
mov a,r7
rrc a
mov r7,a
out_a: mov OCRAH,r6 ;PWM更新
mov OCRAL,r7
mov a,r7
add a,#25
mov OCRBL,a
mov a,r6
addc a,#0
mov OCRBH,a
orl TCR21,#080h;PWM更新
out_b: pop psw
pop acc
ret
;//**************************************************************************************************************
;//功能: 整形乘法long int PID_MUL(int a,int b)用时13.5uS/932-12MHz
;//设 计 者: 牟联树
;//日期: 2003.12.28
;//版 本 号: 1.0
;//申明:
;//**************************************************************************************************************
PUBLIC _PID_MUL
RSEG ?PR?PID_MUL?PIDWork
_PID_MUL:
PID_MUL:push acc
push psw
clr f0 ;符号判断
mov a,r4
jb acc.7,PID_Ma
sjmp PID_Md
PID_Ma: setb f0
mov a,r5
cpl a
add a,#1
mov r5,a
mov a,r4
cpl a
addc a,#0
mov r4,a
PID_Md: ;mov a,r6
; movc,acc.7
;jnbf0,PID_Mf
; cplc
PID_Mf: ;movf0,c
; jbacc.7,PID_Mb
; sjmp PID_Mc
PID_Mb: ;clrc
; mov a,r7
; subb a,#1
; cpla
; mov r7,a
; mov a,r6
; subb a,#0
; cpla
; mov r6,a
PID_Mc: mov a,r5
mov b,r7
mul ab
xch a,r7
mov r3,b
mov b,r4
mul ab
add a,r3
mov r3,a
mov a,b
addc a,#0
xch a,r5
mov b,r6
mul ab
addc a,r3
xch a,r6
xch a,r5
addc a,b
xch a,r5
mov b,r4
mul ab
addc a,r5
mov r5,a
mov a,b
addc a,#0
mov r4,a
jb f0,PID_Me
pop psw
pop acc
ret
PID_Me: mov a,r7
cpl a
add a,#1
mov r7,a
mov a,r6
cpl a
addc a,#0
mov r6,a
mov a,r5
cpl a
addc a,#0
mov r5,a
mov a,r4
cpl a
addc a,#0
mov r4,a
pop psw
pop acc
ret
END
可能会用到的工具/仪表
相关文章
推荐文章
-
 热敏电阻温度阻值查询程序2024年11月13日 74
热敏电阻温度阻值查询程序2024年11月13日 74 -
C99语法规则2024年11月16日 675
-
 FreeRTOS 动态内存管理2024年11月12日 448
FreeRTOS 动态内存管理2024年11月12日 448 -
一款常用buffer程序2024年11月06日 88
-
 1602液晶显示模块的应用2012年08月03日 191
1602液晶显示模块的应用2012年08月03日 191 -
GNU C 9条扩展语法2024年11月18日 261
-
 如何实现STM32F407单片机的ADC转换2024年11月15日 300
如何实现STM32F407单片机的ADC转换2024年11月15日 300 -
 STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
热门文章
-
C99语法规则2024年11月16日 675
-
 51单片机LED16*16点阵滚动显示2012年09月05日 664
51单片机LED16*16点阵滚动显示2012年09月05日 664 -
FreeRTOS 动态内存管理2024年11月12日 448
-
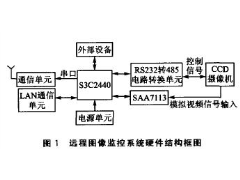 ARM9远程图像无线监控系统2012年07月03日 424
ARM9远程图像无线监控系统2012年07月03日 424 -
 用单片机模拟2272软件解码2012年09月06日 300
用单片机模拟2272软件解码2012年09月06日 300 -
如何实现STM32F407单片机的ADC转换2024年11月15日 300
-
 新颖的单片机LED钟2012年08月06日 278
新颖的单片机LED钟2012年08月06日 278 -
GNU C 9条扩展语法2024年11月18日 261
章节目录