DS18B20数字温度计是DALLAS公司生产的1-Wire,即单总线器件,具有线路简单,体积小的特点。因此用它来组成一个测温系统,具有线路简单,在一根通信线,可以挂很多这样的数字温度计,十分方便。
1.DS18B20产品的特点
(1)、只要求一个端口即可实现通信。
(2)、在DS18B20中的每个器件上都有独一无二的序列号。
(3)、实际应用中不需要外部任何元器件即可实现测温。
(4)、测量温度范围在-55。C到+125。C之间。
(5)、数字温度计的分辨率用户可以从9位到12位选择。
(6)、内部有温度上、下限告警设置。
2.DS18B20的引脚介绍
TO-92封装的DS18B20的引脚排列见图1,其引脚功能描述见表1。

(底视图)图1
表1DS18B20详细引脚功能描述序号名称引脚功能描述
1GND地信号
2DQ数据输入/输出引脚。开漏单总线接口引脚。当被用着在寄生电源下,也可以向器件提供电源。
3VDD可选择的VDD引脚。当工作于寄生电源时,此引脚必须接地。
3.DS18B20的使用方法
由于DS18B20采用的是1-Wire总线协议方式,即在一根数据线实现数据的双向传输,而对AT89S51单片机来说,硬件上并不支持单总线协议,因此,我们必须采用软件的方法来模拟单总线的协议时序来完成对DS18B20芯片的访问。
由于DS18B20是在一根I/O线上读写数据,因此,对读写的数据位有着严格的时序要求。DS18B20有严格的通信协议来保证各位数据传输的正确性和完整性。该协议定义了几种信号的时序:初始化时序、读时序、写时序。所有时序都是将主机作为主设备,单总线器件作为从设备。而每一次命令和数据的传输都是从主机主动启动写时序开始,如果要求单总线器件回送数据,在进行写命令后,主机需启动读时序完成数据接收。数据和命令的传输都是低位在先。
DS18B20的复位时序
DS18B20的读时序
对于DS18B20的读时序分为读0时序和读1时序两个过程。
对于DS18B20的读时隙是从主机把单总线拉低之后,在15微秒之内就得释放单总线,以让DS18B20把数据传输到单总线上。DS18B20在完成一个读时序过程,至少需要60us才能完成。
DS18B20的写时序
对于DS18B20的写时序仍然分为写0时序和写1时序两个过程。
对于DS18B20写0时序和写1时序的要求不同,当要写0时序时,单总线要被拉低至少60us,保证DS18B20能够在15us到45us之间能够正确地采样IO总线上的“0”电平,当要写1时序时,单总线被拉低之后,在15us之内就得释放单总线。
4.C语言源程序
/********************************************************************
DS18B20温度测量程序
** 晶 振 频 率:11.0592M
** 线路->单片机实验开发板A
******************************************************************/
#include <reg51.h>
#include <intrins.h>
#define uchar unsigned char
#define uint unsigned int
sbit PS2 = P2 ^ 6; //数码管十位
sbit PS1 = P2 ^ 7; //数码管个位
sbit P_L = P1 ^ 0; //测量指示
sbit DQ = P2 ^ 2; //DS18B20数据接口
void delay(uint);//延时函数
void DS18B20_init(void);//DS18B20初始化
void get_temper(void);//读取温度程序
void DS18B20_write(uchar in_data);//DS18B20写数据函数
uchar DS18B20_read(void);////读取数据程序
uchar htd(uchar a);//进制转换函数
void display(void);//显示函数
uchar temp;//温度寄存器
bit DS18B20;// 18B20存在标志,1---存在 0---不存在
uchar tab[10] = {0xcf, 0x03, 0x5d, 0x5b, 0x93, 0xda, 0xde, 0x43, 0xdf, 0xdb}; //字段转换表
void main(void)
{
uint a;
while (1) {
get_temper();//测量温度
for (a = 0; a < 200; a++) { //显示,兼有延时的作用
display();
}
}
}
/****************************DS18B20读取温度函数**************************/
/*函数原型:void get_temper(void)
/*函数功能:DS18B20读取温度
/*输入参数:无
/*输出参数:无
/*调用模块:
/*建立时间:2005/11/14
/*作者:站长
/**********************************************************************/
void get_temper(void)
{
uchar k, T_sign, T_L, T_H;
DS18B20_init();//DS18B20初始化
if (DS18B20) { //判断DS1820是否存在?若DS18B20不存在则返回
DS18B20_write(0xcc);// 跳过ROM匹配
DS18B20_write(0x44);//发出温度转换命令
DS18B20_init();//DS18B20初始化
if (DS18B20) { //判断DS1820是否存在?若DS18B20不存在则返回
DS18B20_write(0xcc);//跳过ROM匹配
DS18B20_write(0xbe);//发出读温度命令
T_L = DS18B20_read(); //数据读出
T_H = DS18B20_read();
k = T_H & 0xf8;
if (k == 0xf8) {
T_sign = 1; //温度是负数
}
else {
T_sign = 0; //温度是正数
}
T_H = T_H & 0x07;
temp = (T_H * 256 + T_L) * 0.0625; //温度转换常数
}
}
}
/****************************DS18B20写数据函数**************************/
/*函数原型:void DS18B20_write(uchar in_data)
/*函数功能:DS18B20写数据
/*输入参数:要发送写入的数据
/*输出参数:无
/*调用模块:_cror_()
/*建立时间:2005/11/14
/*作者:站长
/**********************************************************************/
void DS18B20_write(uchar in_data)//写DS18B20的子程序(有具体的时序要求)
{
uchar i, out_data, k;
out_data = in_data;
for (i = 1; i < 9; i++) { //串行发送数据
DQ = 0;
DQ = 1;
_nop_();
_nop_();
k = out_data & 0x01;
if (k == 0x01) { //判断数据 写1
DQ = 1;
}
else { //写0
DQ = 0;
}
delay(4);//延时62us
DQ = 1;
out_data = _cror_(out_data, 1); //循环右移1位
}
}
/**************************DS18B20读函数**************************/
/*函数原型:void DS18B20_read()
/*函数功能:DS18B20读数据
/*输入参数:无
/*输出参数:读到的一字节内容
/*调用模块:delay()
/*建立时间:2005/11/14
/*作者:站长
/******************************************************************/
uchar DS18B20_read()
{
uchar i, in_data, k;
in_data = 0;
for (i = 1; i < 9; i++) { //串行发送数据
DQ = 0;
DQ = 1;
_nop_();
_nop_();
k = DQ; //读DQ端
if (k == 1) { //读到的数据是1
in_data = in_data | 0x01;
}
else {
in_data = in_data | 0x00;
}
delay(3);//延时51us
DQ = 1;
in_data = _cror_(in_data, 1); //循环左移1位
}
return (in_data);
}
/**************************DS18B20初始化函数**************************/
/*函数原型:void DS18B20_init(void)
/*函数功能:DS18B20初始化
/*输入参数:无
/*输出参数:无
/*调用模块:delay()
/*建立时间:2005/11/14
/*作者:站长
/******************************************************************/
void DS18B20_init(void)
{
uchar a;
DQ = 1; //主机发出复位低脉冲
DQ = 0;
delay(44);//延时540US
DQ = 1;
for (a = 0; a < 0x36 && DQ == 1; a++) {
//等待DS18B20回应
a++;
a--;
}
if (DQ) {
DS18B20 = 0; //18B20不存在
}
else {
DS18B20 = 1; // 18B20存在
delay(120);//复位成功!延时240US
}
}
/**************************数码管显示函数**************************/
/*函数原型:void display(void)
/*函数功能:数码管显示
/*输入参数:无
/*输出参数:无
/*调用模块:delay()
/*建立时间:2005/11/14
/*作者:站长
/******************************************************************/
void display(void)
{
P0 = tab[htd(temp) >> 4]; //转换成十进制输出
PS2 = 1;
PS1 = 0;
delay(200);
P0 = tab[htd(temp) & 0x0f]; //转换成十进制输出
PS1 = 1;
PS2 = 0;
delay(200);
P_L = ~DS18B20;
}
/**************************十六进制转十进制函数**************************/
/*函数原型:uchar htd(uchar a)
/*函数功能:十六进制转十进制
/*输入参数:要转换的数据
/*输出参数:转换后的数据
/*调用模块:无
/*建立时间:2005/11/14
/*作者:站长
/******************************************************************/
uchar htd(uchar a)
{
uchar b, c;
b = a % 10;
c = b;
a = a / 10;
b = a % 10;
c = c | b << 4;
return c;
}
/*******************************延时函数*********************************/
/*函数原型:delay(unsigned int delay_time)
/*函数功能:延时函数
/*输入参数:delay_time (输入要延时的时间)
/*输出参数:无
/*调用模块:无
/*建立时间:2005/10/21
/*作者:站长
/**********************************************************************/
void delay(unsigned int delay_time)//延时子程序
{
for (; delay_time > 0; delay_time--)
{}
}
5.汇编语言源程序
ORG 0000H
;单片机内存分配申明!
TEMPER_L EQU 29H ;用于保存读出温度的低8位
TEMPER_H EQU 28H ;用于保存读出温度的高8位
FLAG1 EQU 38H ;是否检测到DS18B20标志位
A_BIT EQU 20H ;数码管个位数存放内存位置
B_BIT EQU 21H ;数码管十位数存放内存位置
;进行温度显示,这里我们考虑用网站提供的两位数码管来显示温度
;显示范围00到99度,显示精度为1度
;因为12位转化时每一位的精度为0.0625度,我们不要求显示小数所以可以抛弃29H的低4位
;将28H中的低4位移入29H中的高4位,这样获得一个新字节,这个字节就是实际测量获得的温度
;这个转化温度的方法非常简洁无需乘于0.0625系数
MAIN: LCALL GET_TEMPER ;调用读温度子程序
MOV A,29H
MOV C,40H ;将28H中的最低位移入C
RRC A
MOV C,41H
RRC A
MOV C,42H
RRC A
MOV C,43H
RRC A
MOV 29H,A
LCALL DISPLAY ;调用数码管显示子程序
JNB FLAG1,MM1
CLR P1.0
SJMP MAIN
MM1: SETB P1.0
SJMP MAIN
INIT_1820:
SETB P2.2 ;这是DS18B20复位初始化子程序
NOP
CLR P2.2
MOV R1,#3 ;主机发出延时537微秒的复位低脉冲
TSR1: MOV R0,#107
DJNZ R0,$
DJNZ R1,TSR1
SETB P2.2 ;然后拉高数据线
NOP
NOP
NOP
MOV R0,#25H
TSR2: JNB P2.2,TSR3 ;等待DS18B20回应
DJNZ R0,TSR2
LJMP TSR4 ;延时
TSR3: SETB FLAG1 ;置标志位,表示DS1820存在
LJMP TSR5
TSR4: CLR FLAG1 ;清标志位,表示DS1820不存在
LJMP TSR7
TSR5: MOV R0,#117
TSR6: DJNZ R0,TSR6 ;时序要求延时一段时间
TSR7: SETB P2.2
RET
GET_TEMPER:
SETB P2.2 ;读出转换后的温度值
LCALL INIT_1820;先复位DS18B20
JB FLAG1,TSS2
RET ;判断DS1820是否存在?若DS18B20不存在则返回
TSS2: MOV A,#0CCH ;跳过ROM匹配
LCALL WRITE_1820
MOV A,#44H ;发出温度转换命令
LCALL WRITE_1820
LCALL DISPLAY ;这里通过调用显示子程序实现延时一段时间,等待AD转换结束,12位的话750微秒
LCALL INIT_1820;准备读温度前先复位
MOV A,#0CCH ;跳过ROM匹配
LCALL WRITE_1820
MOV A,#0BEH ;发出读温度命令
LCALL WRITE_1820
LCALL READ_18200 ;将读出的温度数据保存到35H/36H
RET
WRITE_1820:
MOV R2,#8 ;写DS18B20的子程序(有具体的时序要求),一共8位数据
CLR C
WR1: CLR P2.2
MOV R3,#5
DJNZ R3,$
RRC A
MOV P2.2,C
MOV R3,#21
DJNZ R3,$
SETB P2.2
NOP
DJNZ R2,WR1
SETB P2.2
RET
READ_18200:
MOV R4,#2 ;读DS18B20的程序,从DS18B20中读出两个字节的温度数据,将温度高位和低位从DS18B20中读出
MOV R1,#29H ;低位存入29H(TEMPER_L),高位存入28H(TEMPER_H)
RE00: MOV R2,#8 ;数据一共有8位
RE01: CLR C
SETB P2.2
NOP
NOP
CLR P2.2
NOP
NOP
NOP
SETB P2.2
MOV R3,#8
RE10: DJNZ R3,RE10
MOV C,P2.2
MOV R3,#21
RE20: DJNZ R3,RE20
RRC A
DJNZ R2,RE01
MOV @R1,A
DEC R1
DJNZ R4,RE00
RET
DISPLAY:MOV A,29H ;显示子程序将29H中的十六进制数转换成10进制
MOV B,#10 ;10进制/10=10进制
DIV AB
MOV B_BIT,A ;十位在A
MOV A_BIT,B ;个位在B
MOV DPTR,#NUMTAB ;指定查表启始地址
MOV R0,#4
DPL1: MOV R1,#250 ;显示1000次
DPLOP: MOV A,A_BIT ;取个位数
MOVC A,@A+DPTR ;查个位数的7段代码
MOV P0,A ;送出个位的7段代码
CLR P2.6 ;开个位显示
ACALL D1MS ;显示1MS
SETB P2.6
MOV A,B_BIT ;取十位数
MOVC A,@A+DPTR ;查十位数的7段代码
MOV P0,A ;送出十位的7段代码
CLR P2.7 ;开十位显示
ACALL D1MS ;显示1MS
SETB P2.7
DJNZ R1,DPLOP ;100次没完循环
DJNZ R0,DPL1 ;4个100次没完循环
RET
D1MS: MOV R7,#80 ;1MS延时
DJNZ R7,$
RET
;实验板上的7段数码管0~9数字的共阴显示代码
NUMTAB: DB 0CFH,03H,5DH,5BH,93H,0DAH,0DEH,43H,0DFH,0DBH
END
-
 热敏电阻温度阻值查询程序2024年11月13日 74
热敏电阻温度阻值查询程序2024年11月13日 74 -
C99语法规则2024年11月16日 675
-
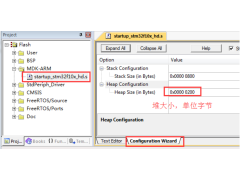 FreeRTOS 动态内存管理2024年11月12日 448
FreeRTOS 动态内存管理2024年11月12日 448 -
一款常用buffer程序2024年11月06日 88
-
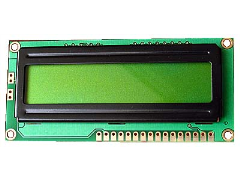 1602液晶显示模块的应用2012年08月03日 191
1602液晶显示模块的应用2012年08月03日 191 -
GNU C 9条扩展语法2024年11月18日 261
-
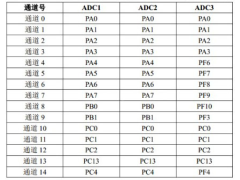 如何实现STM32F407单片机的ADC转换2024年11月15日 300
如何实现STM32F407单片机的ADC转换2024年11月15日 300 -
 STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
-
C99语法规则2024年11月16日 675
-
 51单片机LED16*16点阵滚动显示2012年09月05日 664
51单片机LED16*16点阵滚动显示2012年09月05日 664 -
FreeRTOS 动态内存管理2024年11月12日 448
-
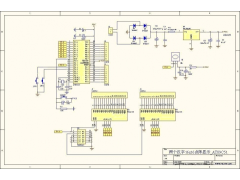
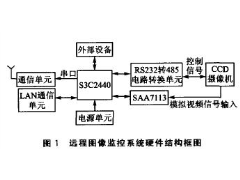 ARM9远程图像无线监控系统2012年07月03日 424
ARM9远程图像无线监控系统2012年07月03日 424 -
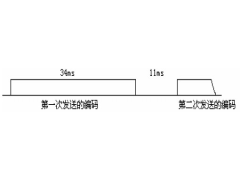 用单片机模拟2272软件解码2012年09月06日 300
用单片机模拟2272软件解码2012年09月06日 300 -
如何实现STM32F407单片机的ADC转换2024年11月15日 300
-
 新颖的单片机LED钟2012年08月06日 278
新颖的单片机LED钟2012年08月06日 278 -
GNU C 9条扩展语法2024年11月18日 261