#include "config.h"
#defineTaskStkLengh64
OS_STKTaskStk [TaskStkLengh];
OS_STKTaskStk1 [TaskStkLengh];
OS_STKTaskStk2 [TaskStkLengh];
OS_EVENT*TASK1;
OS_EVENT*TASK2;
OS_EVENT*TASK3;
voidTask0(void *pdata);//Task0 ÈÎÎñ0
voidTask1(void *pdata);
voidTask2(void *pdata);
uint8 err;
voidUART0_Ini(void)
{uint16 Fdiv;
U0LCR = 0x83;
Fdiv = (Fpclk / 16) / UART_BPS;
U0DLM = Fdiv / 256;
U0DLL = Fdiv % 256;
U0LCR = 0x03;
}
voidUART0_SendByte(uint8 data)
{U0THR = data;// ·¢ËÍÊý¾Ý
while( (U0LSR&0x40)==0 );// µÈ´ýÊý¾Ý
}
int main (void)
{
OSInit
();
OSTaskCreate (Task0,(void *)0, &TaskStk[TaskStkLengh - 1], 0);
TASK1=OSSemCreate(0);
TASK2=OSSemCreate(0);
TASK3=OSSemCreate(0);
TargetInit();
OSStart ();
return 0;
}
/*********************************************************************************************************
**Task0 ÈÎÎñ0
********************************************************************************************************/
void Task0(void *pdata)
{
UART0_Ini();
OSTaskCreate(Task1, (void *)0, &TaskStk1[TaskStkLengh-1], 9);
OSTaskCreate(Task2, (void *)0, &TaskStk2[TaskStkLengh-1], 10);
OSSemPost(TASK1);
for (;;)
{
OSSemPend(TASK1,10,&err
if(err==OS_NO_ERR)
{
UART0_SendByte(0x01);
OSSemPost(TASK2);
}
}
}
/*********************************************************************************************************
**Task1 ÈÎÎñ1
********************************************************************************************************/
void Task1(void *pdata)
{
UART0_Ini();
for (;;)
{
OSSemPend(TASK2,10,&err);
if(err==OS_NO_ERR)
{
UART0_SendByte(0x02);
OSSemPost(TASK3);
}
}
}
void Task2(void *pdata)
{
UART0_Ini();
for (;;)
{
OSSemPend(TASK3,10,&err);//»&
if(err==OS_NO_ERR)
{
UART0_SendByte(0x03);
OSSemPost(TASK1);
}
}
}
三个任务分别通过UART0输出0X01,0X02,0X03,可以学习理解信号量的基本用法及多任务的调度方法.
以上例子基于LPC2200系列ARM.
-
 热敏电阻温度阻值查询程序2024年11月13日 74
热敏电阻温度阻值查询程序2024年11月13日 74 -
C99语法规则2024年11月16日 675
-
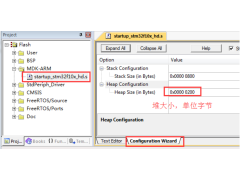 FreeRTOS 动态内存管理2024年11月12日 448
FreeRTOS 动态内存管理2024年11月12日 448 -
一款常用buffer程序2024年11月06日 88
-
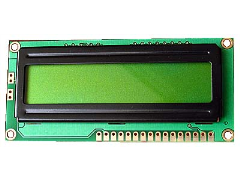 1602液晶显示模块的应用2012年08月03日 192
1602液晶显示模块的应用2012年08月03日 192 -
GNU C 9条扩展语法2024年11月18日 261
-
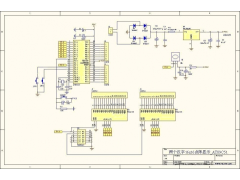
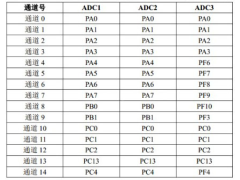 如何实现STM32F407单片机的ADC转换2024年11月15日 300
如何实现STM32F407单片机的ADC转换2024年11月15日 300 -
 STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
-
C99语法规则2024年11月16日 675
-
 51单片机LED16*16点阵滚动显示2012年09月05日 664
51单片机LED16*16点阵滚动显示2012年09月05日 664 -
FreeRTOS 动态内存管理2024年11月12日 448
-
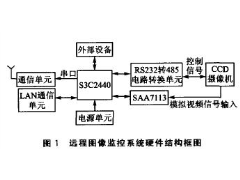 ARM9远程图像无线监控系统2012年07月03日 424
ARM9远程图像无线监控系统2012年07月03日 424 -
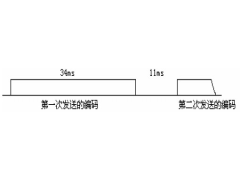 用单片机模拟2272软件解码2012年09月06日 300
用单片机模拟2272软件解码2012年09月06日 300 -
如何实现STM32F407单片机的ADC转换2024年11月15日 300
-
 新颖的单片机LED钟2012年08月06日 278
新颖的单片机LED钟2012年08月06日 278 -
GNU C 9条扩展语法2024年11月18日 261